
应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件监控器、传感器、发动机等)是彼此分开的,并能够独立替换
应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
第1题:
A.传感器的选择及精度分析
B.技术经济分析
C.控制系统硬件电路设计
D.控制系统软件配置与调试
第2题:
● 某公司欲开发一种工业机器人,用来进行汽车零件的装配。公司的架构师经过分析与讨论,给出了该机器人控制软件的两种候选架构方案:闭环控制和分层结构。以下对于这两种候选架构的选择理由,错误的是 (55)
(55)
A. 应该采用闭环控制架构,因为闭环结构给出了将软件分解成几个协作构件的方法,这对于复杂任务特别适合
B. 应该采用闭环控制结构,因为闭环控制架构中机器人的主要构件(监控器、传感器、发动机等)是彼此分开的,并能够独立替换
C. 应该采用分层结构,因为分层结构很好地组织了用来协调机器人操作的构件,系统结构更加清晰
D. 应该采用分层结构,因为抽象层的存在,满足了处理不确定性的需要:在较低层次不确定的实现细节在较高层次会变得确定
第3题:
A、弧焊机器人
B、点焊机器人
C、搬运机器人
D、装配机器人
第4题:
阅读以下软件系统架构选择的问题。
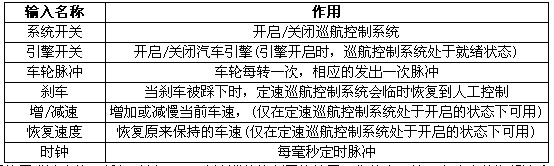
某公司欲开发一个车辆定速巡航控制系统,以确保车辆在不断变化的地形中以固定的速度行驶。该系统的简化示意图如下图所示。各种系统输入的含义见下表。
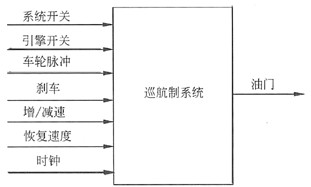
定速巡航控制系统输入说明
公司的领域专家对需求进行深入分析后,将系统需求认定为:任何时刻,只要定速巡航控制系统处于工作状态,就要有确定的期望速度,并通过调整引擎油门的设定值来维持期望速度。
在对车辆定速巡航控制系统的架构进行设计时,公司的架构师王工提出采用面向对象的架构风格,而李工则主张采用控制环路的架构风格。在架构评估会议上,专家对这两种方案进行综合评价,最终采用了面向对象和控制环路相结合的混合架构风格。
[问题1]
在实际的软件项目开发中,采用成熟的架构风格是项目成功的保证。请用200字以内的文字说明:什么是软件架构风格:面向对象和控制环路两种架构风格各自的特点。
[问题2]
用户需求没有明确给出该系统如何根据输入集合计算输出。请用300字以内的文字针对该系统的增减速功能,分别给出两种架构风格中的主要构件,并详细描述计算过程。
[问题3]
实际的软件系统架构通常是多种架构风格的混合,不同的架构风格都有其适合的应用场景。以该系统为例,针对面向对象架构风格和控制环路架构风格,各给出两个适合的应用场景,并简要说明理由。
第5题:
A.①②③④
B.①②③⑤
C.①③④⑤
D.①②③④⑤
第6题:
试题(51)
某公司欲开发一个漫步者机器人,用来完成火星探测任务。机器人的控制者首先定义探测任务和任务之间的时序依赖性,机器人接受任务后,需要根据自身状态和外界环境进行动态调整,最终自动完成任务。针对这些需求,该机器人应该采用 (51) 架构风格最为合适。
(51)
A. 解释器
B. 主程序-子程序
C. 隐式调用
D. 管道-过滤器
第7题:
A.①②③④
B.①②③⑤
C.①③④⑤
D.②③④⑤
第8题:
A.解释器
B.主程序-子程序
C.隐式调用
D.管道-过滤器
本题主要考查架构风格与架构设计策略。根据题目描述,漫步者机器人需要根据自身状态的外界环境进行自动调整,这是一个典型的根据外部事件进行响应的场景。比较4个候选项,隐式调用比较适合根据外部事件进行处理和动作的情景。
第9题:
此题为判断题(对,错)。
第10题:
A、B两种机器人都被用来搬运化工原料,A型机器人比B型机器人每小时多搬运30kg,A型
机器人搬运900kg所用时间与B型机器人搬运600kg所用时间相等,两种机器人每小时分别搬运多少化工原料?