后方交会
侧方交会
方向交会
前方交会
第1题:
这些控制点称为(),相邻导线点间的距离称为(),相邻导线边之间的水平角称为()
A导线点,导线边,转折角
B转折点,导线边,转折角
C导线点,导线边,水平角
D转折点,导线边,水平角
第2题:
此题为判断题(对,错)。
第3题:
A、测角前方交会
B、测角后方交会
C、测角侧方交会
第4题:
第5题:
第6题:
A、极径和极角
B、极坐标
C、直角坐标
D、自然坐标
E、x轴和y轴
F、法向分量和径向分量
第7题:

第8题:
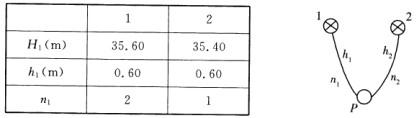
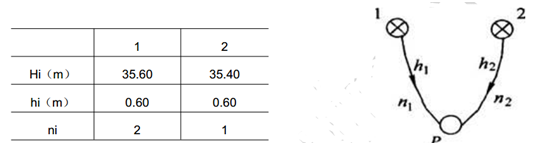
在进行平面控制点加密时,从两个相邻的已知点A、B向待定点P观测水平角∠PAB和∠ABP,以计算P点坐标的测定方法,称为()。
A、测边交会
B、侧方交会
C、前方交会
D、后方交会
第9题:
第10题: