
可解结点
第1题:
此题为判断题(对,错)。
第2题:
A、精确解
B、渐近解
C、近似解
D、解析解
第3题:
A.在扩展结点处,先生成其所有的儿子结点(分支)
B.从当前的活结点表中选择上一个扩展结点。
C.为了有效地选择下一扩展结点,加速搜索的进程,在每一个活结点处,计算一个函数值(限界)
D.根据函数值,从当前活结点表中选择一个最有利的结点作为扩展结点,使搜索朝着解空间上有最优解的分支推进,以便尽快地找出一个最优解。
第4题:
在对问题的解空间树进行搜索的方法中,一个活结点有多次机会成为活结点的是()
第5题:
所谓“全双工”是指( )。
A.在两个结点之间可同时逆向传输两个数据帧
B.在两个结点之间可同时同向传输两个数据帧
C.在两个结点之间可同时逆向传输两个数据帧,但要进行“侦听”
D.在两个结点之间可同时同向传输两个数据帧,但要进行“侦听”
第6题:
考虑表6—1的实例,假设有3个物品,背包容量为22。图6—6中是根据上述算法构造的搜索树,其中结点的编号表示了搜索树生成的顺序,边上的数字I/O分别表示选择/不选择对应物品。除了根结点之外,每个左孩子结点旁边的上下两个数字分别表示当前背包的重量和已获得的价值,右孩子结点旁边的数字表示扩展了该结点后最多可能获得的价值。为获得最优解,应该选择物品 (5) ,获得的价值为 (6)。
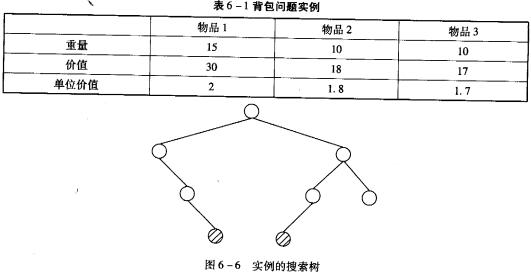
对于表6—1的实例,若采用穷举法搜索整个解空间,则搜索树的结点数为 (7) ,而用了上述回溯法,搜索树的结点数为 (8) .
第7题:
A、单结点力矩分配法得到精确解
B、多结点力矩分配法得到渐近解
C、首先从结点不平衡力矩绝对值较大的结点开始
D、结点不平衡力矩要变号分配
E、不能同时放松相邻结点
第8题:
此题为判断题(对,错)。
第9题:
用位移法解超静定结构时,附加刚臂上的反力矩是利用结点平衡求得的。
A对
B错
第10题:
用回溯法解题的一个显著特征是在搜索过程中动态产生问题的解空间。在任何时刻,算法只保存从根结点到当前扩展结点的路径。如果解空间树中从根结点到叶结点的最长路径的长度为h(n),则回溯法所需的计算空间通常为()